01WHO WE ARE
Engineering Autonomy
Engineering Autonomy
Beneath the Waves
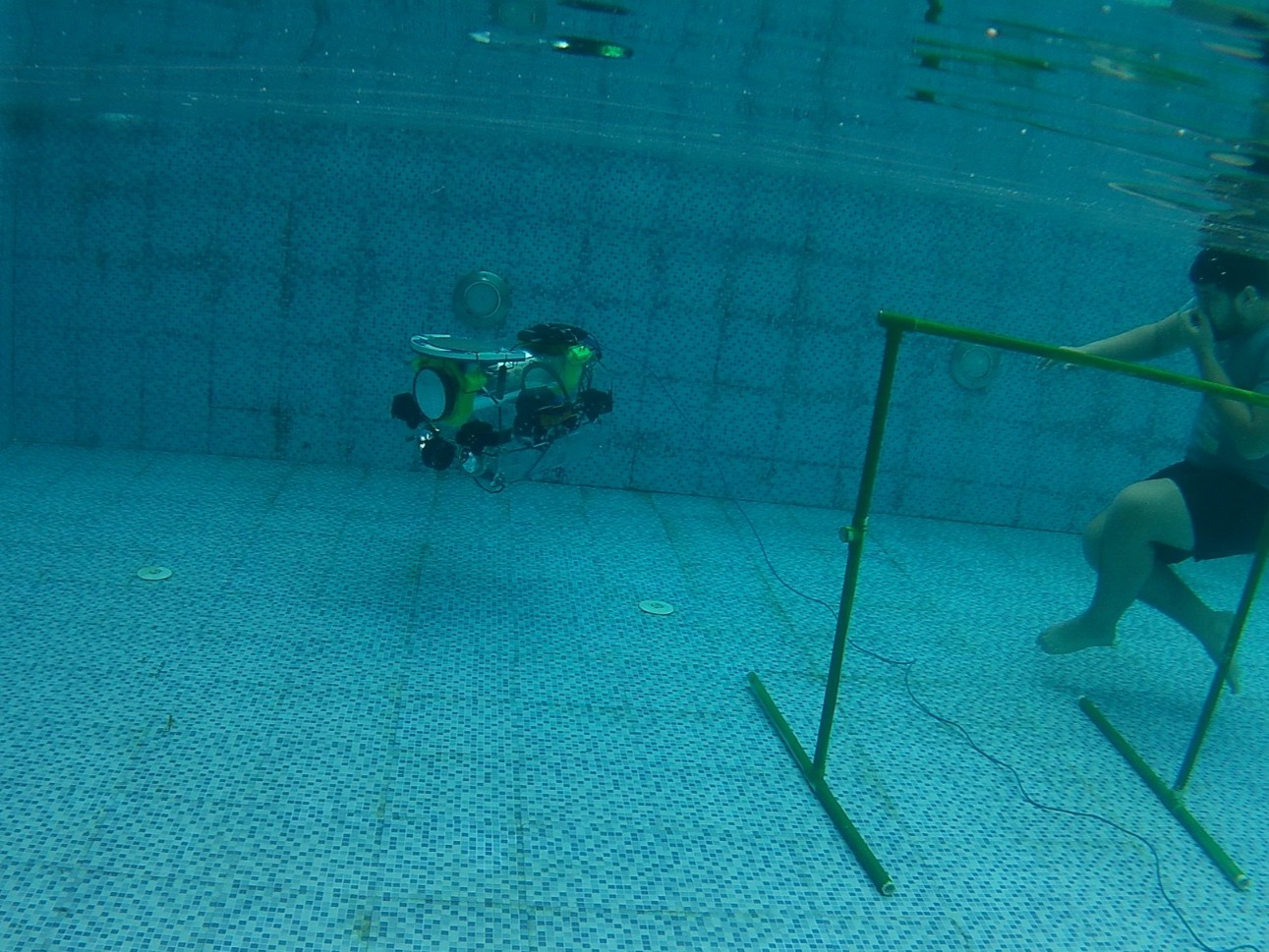
DTU AUV is the premier autonomous underwater vehicle team at Delhi Technological University. Founded in 2015, we design, build, and program fully autonomous submarines that navigate, detect, and interact with underwater environments — without any human intervention.
Our multidisciplinary team of 40+ students spans mechanical engineering, electronics, computer science, and design — united by a shared passion for marine robotics.